Department of Robot Engineering - Engineering Sciences
Department of Robot Engineering
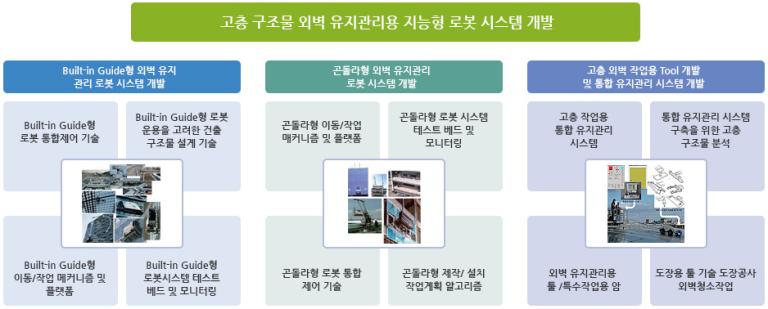
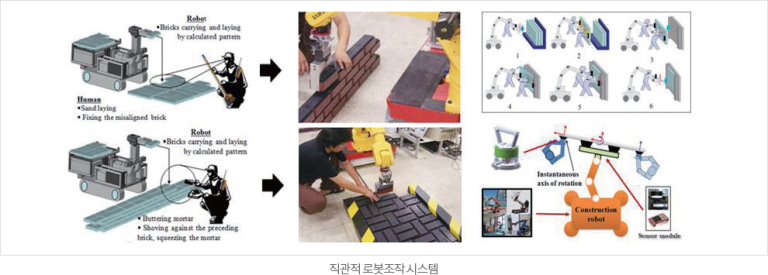
Building Maintenance Robot Research Center (BMR Center)
The Building Maintenance Robot Research Center(BMRC) is established to develop built-in guides and gondola type intelligent robot systems and other multipurpose tools for special tasks such as cleaning the walls of various buildings, painting, and more.
CIM and Robotics LAB (C&R LAB)
The C&R Lab conducts several research in the field of robotics specifically related to human-robot interactionm which requires human intelligence, robot precision, and power. Major topics of research are robot position and force control, human motion intent-based robotic exoskeleton, haptics and remote robotic operations. The lab develops various wearable robotic exoskeletons, rehabilitation robots, and intuitive robot operating systems.


Robot Path Planning LAB
The research goal of the lab is to develop an algorithm that enables robots operate autonomously in a complex environment. The major topics of research is focused on motion planning for mobile robots with holonomic and nonholonomic constraints and also for highly-articulated robots, operating in a highly-dimensional configuration space. We also study the modelling of the environment using range sensors.

Robot Design LAB
The major research topics of the Robot Design Lab include the optimal design of robotic manipulators, the design methodology for manipulators, design and motion generation for energy efficiency maximization, analyses of control, and the design parameters of underactuated systems. The lab performs research on design methods that analyze kinematic/dynamic performances of robotic systems, define parameters that can quantitatively evaluate the performance, and thereby optimize the performance by linking these parameters logically. Also the lab studies the gravity compensation mechanism that can handle large payloads, and efficient robotic systems that can be used maximally for the system’s dynamic characters and underactuated systems.
