機器人工程系 - ERICA 工学学院
機器人工程系
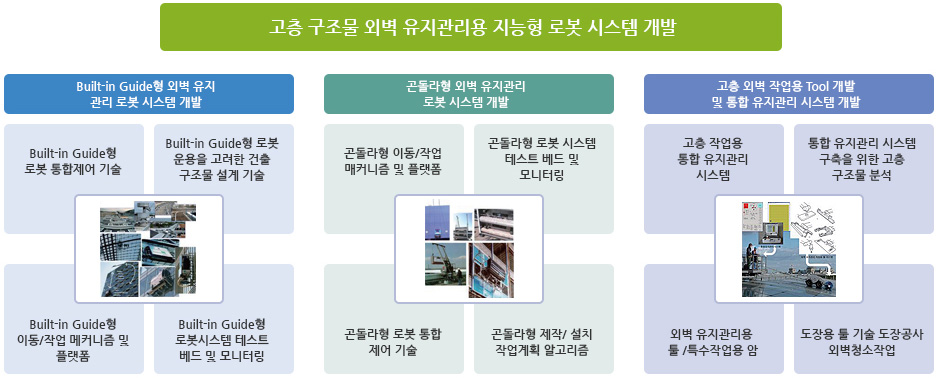
用于保护管理高层建筑物外壁的智能型机器人系统开发
Built-in guide型 外壁保持管理 机器人系统开发
尖端机器人研究室
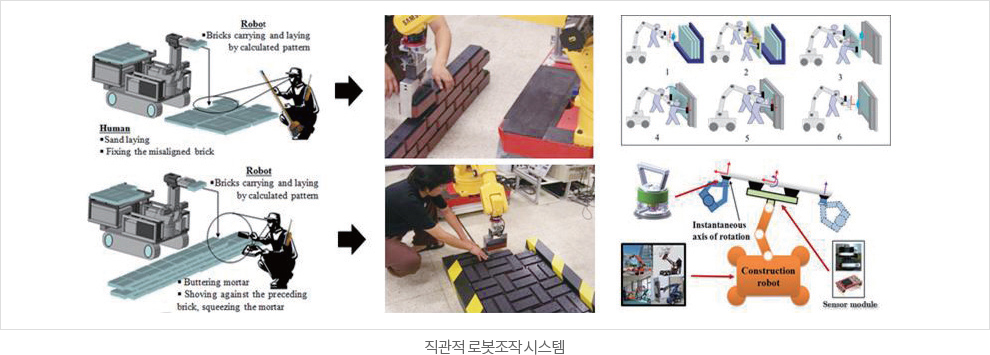
尖端机器人研究室正在进行利用人的认知能力和判断力、机器人的精密和巨大力量的人类-机器人合作相关的多种研究。 主要研究领域有机器人位置控制及力量控制技术、基于人动作意图的肌肉增强及肌肉辅助技术、机器人触觉及遥控技术等,并应用这些技术研究开发穿戴式肌肉增强机器人、穿戴式康复机器人、远程机器人控制系统、直觉机器人操作系统等。


机器人路径规划研究室
ㅁㅁㅁㅁㅁㅁㅁㅁㅁㅁㅁㅁ机器人路径计划研究室的主要目标是研究智能型机器人自主移动的核心技术。 路径计划或运动计划是生成将机器人的开始及目标姿势与障碍物无冲突地连接起来的动作路径的方法。 这不仅意味着2D或3D空间上的路径,还意味着更高层次的机器人configuration space中的路径计划。 例如,移动机器人在平面上生成二维位置及方向,机器人手臂或类人机器人等多关节机器人生成所有关节角度。 这种路径规划方法应用于各种机器人,例如,具有最小旋转半径约束条件的移动机器人的基于传感器的导航,多关节机器人或双臂机器人的操作/组装路径规划以及高自由度移动机械手的自适应运动计划。

机器人设计研究室
机器人设计研究室的研究领域大致可分为机器人机械手最佳设计及设计方法论开发、机器人系统能效最大化的设计及动作生成、不充分驱动系统的设计及控制参数解释等。 主要研究制定分析机器人的机械/动态性能并量化的指标,以此为基础优化设计参数或逻辑连接要求规格和设计参数的设计方法论,开发能够处理机器人最大功率对比大负载的动力生成及提高能量效率的重力补偿装置,最大限度地利用系统的动态特性,对高效机器人系统及为控制动作的不充分驱动系统的解释进行研究。

网络物理系统实验室
 |
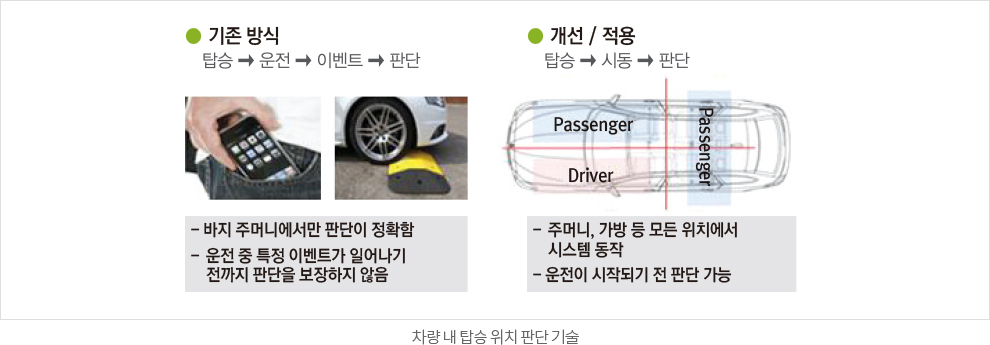
网络物理系统研究室为了效率、准确度、经济性等,主要进行能够紧密连接网络世界和物理世界的ICBM(IoT、Cloud、Big Data、Mobile)技术的融合相关研究。 详细的研究主题是 1) 利用该机种传感器提取信息 2) 移动设备定位法 3) 智能家居个人信息安全 4) 利用可穿戴设备进行生物信息分析 5) 基于大数据的模式分析 6) 安全驾驶系统 7) 智能无人机 |
|---|